研究前沿
机载激光雷达在古代城址考古调查中的应用研究
原作者: 田松林,秦高敏,乔保同,王巍,于春 |
发布时间:2023-12-27 22:38 |
查看: 1415 | 发布者: coolcool |
摘要: 一、引言随着第四次全国文物普查的开展,古代城址作为过去人们生活场域和历史事件的空间载体将是调查的重点对象。受城市建设、历史变迁等因素影响,古代城址大多被“淹没”在山烟蔓草或现代聚落之间,遗迹特征无法通过摄影测量等传统的空间考古手段感知和识别。人工踏查虽然可以发现隐藏在植被或其他地物下的城址遗迹结构,但常面临着路途崎岖难以到达、遗 ...
 随着第四次全国文物普查的开展,古代城址作为过去人们生活场域和历史事件的空间载体将是调查的重点对象。受城市建设、历史变迁等因素影响,古代城址大多被“淹没”在山烟蔓草或现代聚落之间,遗迹特征无法通过摄影测量等传统的空间考古手段感知和识别。人工踏查虽然可以发现隐藏在植被或其他地物下的城址遗迹结构,但常面临着路途崎岖难以到达、遗迹记录和测量效率较低等问题。近年来自动驾驶发展,激光雷达作为相关硬件量产,由此带来终端产品价格下降,面向测绘领域的激光雷达负载相机也逐渐迈向平民化。这为考古调查采用激光雷达方案提供可能。因此,本文提出一种基于小型无人机搭载激光雷达的古代城址调查方案,在更好地感知和识别地表干扰物较多的古代城址结构,提升考古调查效率的同时,进一步提升考古调查数据的有效性和质量,为古代城址保护、考古勘探与发掘以及后续的文化旅游开发提供良好的前置资料。
随着第四次全国文物普查的开展,古代城址作为过去人们生活场域和历史事件的空间载体将是调查的重点对象。受城市建设、历史变迁等因素影响,古代城址大多被“淹没”在山烟蔓草或现代聚落之间,遗迹特征无法通过摄影测量等传统的空间考古手段感知和识别。人工踏查虽然可以发现隐藏在植被或其他地物下的城址遗迹结构,但常面临着路途崎岖难以到达、遗迹记录和测量效率较低等问题。近年来自动驾驶发展,激光雷达作为相关硬件量产,由此带来终端产品价格下降,面向测绘领域的激光雷达负载相机也逐渐迈向平民化。这为考古调查采用激光雷达方案提供可能。因此,本文提出一种基于小型无人机搭载激光雷达的古代城址调查方案,在更好地感知和识别地表干扰物较多的古代城址结构,提升考古调查效率的同时,进一步提升考古调查数据的有效性和质量,为古代城址保护、考古勘探与发掘以及后续的文化旅游开发提供良好的前置资料。
激光雷达(LIDAR)是一项主动测量技术,它借助激光发射器发射一束光,照射被测对象后返回,通过计算光束飞行时间(TOF)构建出被测对象的三维形态与几何特征,形成点云。相较于摄影测量,激光雷达可有效重建微小的地貌现象;其次,激光雷达光束具有穿透性,可穿过植被获取地面信息,发现潜在的遗迹;第三,基于其主动探测特性,激光雷达在光线条件较差甚至夜间也能获取高质量的数据,作业灵活性较强。因此,它广泛用于地形测绘、电力精细巡检等行业。考古方面,研究者借助机载激光雷达发现隐藏在密林下的玛雅遗址与吴哥城址的完整结构等,随着人工智能图像识别的发展,考古学家甚至借助激光雷达点云识别潜在的遗迹特征,构建预测模型。古代城址的调查工作多样,空间感知是第一位的,即以遥感获取和感知城址所在景观的整体特征,并通过城墙残存的结构、壕沟、河流等自然地理因素确定城址空间的范围,并寻找城门、道路、建筑遗存等要素,实现城址内外空间的认知。因此,激光雷达在古代城址的考古调查中,主要解决两个重要的问题:第一是获取植被遮挡或隐藏在建筑物之间的城址遗迹结构信息,尤其是城墙,减少现代景观对遗迹本体特征的干扰;第二是采集那些受破坏较严重,现今地表残存不明显的城址结构三维信息,再借助微地貌重建方法将其形态和位置进行还原,以便考古勘探验证。
南阳地区历史悠久,历代建城数量较多,如博望故城、金汤寨古城、梁城等。这些城址时间跨度大,涵盖春秋战国、秦汉和隋唐时期,类型丰富,是研究历史时期古代城市的重要资料。城址数量多,意味着保存状况多样。受城市建设、农业活动影响,南阳地区古代城址或被植被覆盖;或因农田开垦导致残存墙体被破坏,航拍影像无法有效获取遗迹信息;更有一些城址与如今的县城重合,被叠压在现代建筑之下,无法直接感知。基于激光雷达的特性以及对南阳古代城址保存状况的综合考虑,我们选择了博望故城、金汤寨古城、梁城、方城、圣井寺古城和棘阳城(图一)作为案例,探讨小型无人机搭载便携式激光可见光融合负载对古代城址考古调查的创新作用。
硬件方面采用大疆行业无人机Matrice 300 RTK搭载L2进行(图二)。飞机空重6.3KG,属于小型无人机范畴,操作简便,单架次续航约30分钟,装载4G模块以适应远距离或者电磁讯号干扰较大的区域飞行;L2为大疆新一代自研激光雷达测绘模块,有效测程250米,测绘精度水平约5厘米,高程约4厘米;此外L2可支持收集五回波数据,采样频率最高可达240KHZ,可有效获取密林下方的裸土点云,进而构建数字高程模型。
图二 大疆M300RTK搭载禅思L2激光雷达测绘负载相较于航拍采用手动模式,激光雷达扫描一般选择航线飞行。在DJI Pilot 2地面站软件中规划好需要飞行的区域,选择负载类型为L2雷达建模,软件即可自动生成一条带有惯导标定的扫描航线(图三)。如遇地形起伏较大的区域,可导入置DSM数据生成仿地航线,飞行器将按照地形起伏变高飞行,保障测区内数据精度的一致性。航线参数上,由于任务性质为考古调查,对细节的要求较考古发掘现场三维记录低。综合任务要求和L2性能,设置飞行高度为130m(因博望故城位于南阳姜营机场限高区,飞行航高100m),航速8m/s,旁向重叠率30%,采样频率240KHz,五回波重复扫描。该参数下点云密度平均132点/㎡,高于1:500数字高程模型所需的最小点密度(注:1:500激光雷达数字高程模型要求点密度≥16点/㎡),可满足考古基础资料的精度要求。
图三 激光雷达扫描航线示意图(金汤寨古城)
数据处理方面则分为预处理、点云深度处理和数据可视化三个环节。首先采用大疆智图(图四)将L2采集的原始激光雷达数据处理成标准格式点云(LAS)。在此过程中,大疆智图可支持地面点分类,将地面点和其他地物(植被、建筑物等)分离,方便后续生成数字高程模型。完成后转点云深度处理,此步骤可采用专门的点云处理软件进行,如LIDAR360、PCA点云智绘等。点云的深度处理包括植被滤波、噪点去除、地面点提取和生成数字高程模型。该环节可有效去除古城区域内的植被、建筑等地物,仅保留地表信息,生成的数字高程模型可更有效地进行遗迹结构判读。最后是数据可视化处理,即通过ArcGIS Pro对数字高程模型进行栅格函数计算,并添加比例尺、指北针、图例等信息,形成完整的古代城址数字高程图,以便进行考古分析,指导后续的考古勘探和发掘工作。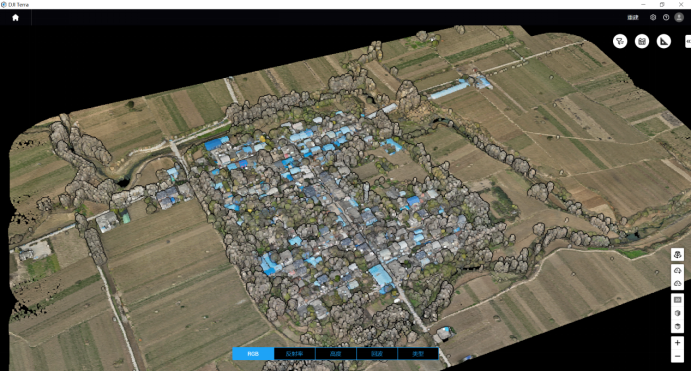
图四 大疆智图处理L2激光雷达数据
此次调查的古代城址中,影响可见光影像识别的因素主要有三方面:1.植被覆盖、2.结构特征起伏较小、3.被密集建筑物遮挡。其中金汤寨、博望故城和圣井寺古城属于1类,梁城和棘阳城属于2类,方城西城墙属于3类。下面我们基于激光雷达遥感数据,对这三类场景下的古城结构进行识别与判断。植被覆盖下的城址遗迹识别。植被覆盖是影响考古学家判断古代城址结构,尤其是墙体和范围的主要因素。南阳地区古代城址上的植被虽然不及玛雅遗址茂密,但仍然对城址墙体的结构和形态识别产生较大的影响。金汤寨古城位于村庄中,城墙所在位置既有树木,也有护栏、大棚等等临时建筑,这种情况在博望故城也类似。航拍仅能根据遗址区域周边的河流、壕沟确定大致范围,无法识别其墙体的具体形态。L2在采集这两座城址的点云数据后,生成的DEM显示了金汤寨古城的城墙虽然大部分被村庄周边的树木覆盖,但保存相对完好,可以准确识别出城址的范围(图五)。东北角因河流侵蚀与现代建设,有部分墙体损毁。博望故城较金汤寨更大,地表建筑、植被更为复杂,但在激光雷达采集数据并进行植被滤波和地面点提取后,生成的DEM显示了古城西北侧的墙体结构相对完好,但东部和南部基本不见城墙的结构特征,仅能通过故城四周的河道大致判断当时城址的最大范围(图六)。一些保存完好的古城,如本次调查的圣井寺古城,墙体上方有部分植被覆盖影响了整体城墙的结构记录,借助激光雷达的穿透性特征即可实现完整记录(图七),无需人工地面全站仪打点测量林下遗迹高程,极大提升了城址考古调查的效率。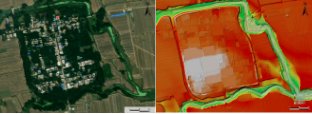
图五 金汤寨古城现代卫星图(左)与L2激光雷达地貌模型(右)


图六 博望故城现代卫星图(左)与L2激光雷达地貌模型(右)
图七 圣井寺古城植被去除前(左)和去除后(右)城址结构对比
城址结构的微地貌特征识别。在现代社会经济建设活动中总会出现有意或无意破坏古代城址结构的情况。一些城址的墙体或建筑可能较为坚固,现代活动不一定完全将其损毁,可能留下了细微痕迹。这些痕迹通常表现为微小的地貌起伏,即“微地貌特征”。透过激光雷达对这一类地貌形态的感知与重建,我们也可以复原古代城址的基本结构,为钻探、保存状况评估等提供前导信息。
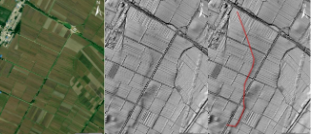
梁城遗址就属于此类情况。由于农村建设和耕地平整,以及建设风力发电机的需要,梁城村周边的土地经过平整,城墙可能已经被破坏。从当前时段的卫星影像和即时拍摄的航空影像中,梁城遗址基本无法看到任何墙体特征(图八左)。激光雷达扫描后获取的DEM上,隐约可见梁城遗址范围的西南侧有一处线性高程异常(图八中),形态类似城墙的拐角。我们借助ArcGIS Pro栅格计算中的“山体阴影”的Z因子倍数功能,将高程向上拉伸5倍,得到一张高程拉伸的地貌模型(图八右),结果显示了遗址西南侧存在一道疑似城墙的微地貌结构。对此结果可根据图上的微地貌特征区开展考古勘探,结合钻探结果可进一步确认该地貌对应的遗迹性质。
梁城遗址的微地貌城墙识别工作也为同样属于南阳古城调查目标棘阳城的城墙识别提供了思路。棘阳城从当前卫星图上看,城墙、门道结构几乎完全不可见,仅能从既往的文物普查资料得知在明月寺的东侧残存一段墙体。借助激光雷达微地貌感知与景观重建,我们发现了疑似墙体的微地貌起伏特征,形态上可能是其东墙的一部分,具体性质有待后续的考古勘探进一步确认(图九)。

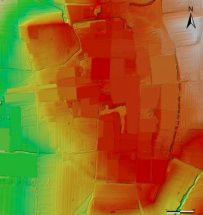

图八 梁城遗址卫星影像(左)、地貌模型(中,高程为真实高度)与微地貌景观重建图(右,高程向上拉伸五倍,红线处为疑似墙体)
图九 棘阳城卫星图(左)、高程增益5倍的微地貌模型(中)以及对疑似墙体的标注(右)
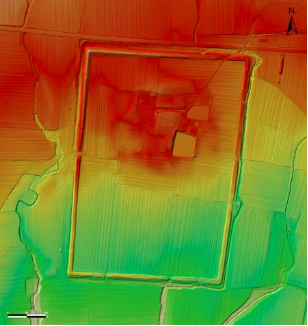
城市建筑区域内古代城墙的识别。古代城市的选址往往是自然和人文条件较好的区域,因此现代聚落也有可能直接在古代城市之上建设,如西安市。一些古城的遗迹结构难免被现代建筑物包围,一般的小型无人机低空遥感无法有效获取其结构信息。凭借激光雷达点云可进行地物分类的特性,我们可以将建筑物点云进行分类,然后剔除,让遗迹结构清晰显示在最终结果上(图十)。通过此法,我们对方城西城墙残存的部分进行了扫描记录,并还原其墙体结构(图十一)。需注意,此方法仅适用于被建筑物包围的古代城址结构,对于覆盖在建筑物下方的城址遗迹,则无法有效获取相关信息,需要借助航磁、探地雷达等技术才能进一步识别。
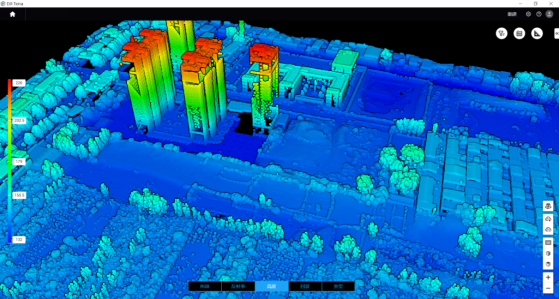
图十 方城西侧城墙点云形态
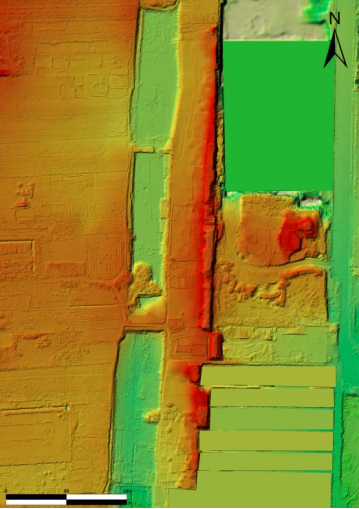
图十一 方城西侧城墙数字高程模型
综上,采用M300RTK搭载L2进行调查工作,可有效降低因植被覆盖、遗迹结构特征不明显和建筑物密集对识别古代城址遗迹结构发现与识别的干扰,进一步提升低空遥感考古调查的有效性和数据的质量。同时L2激光雷达自动化程度高,外场作业难度较低,具备规模化应用的可能性。将机载激光雷达普及古代城址调查,无疑促进了古代城址调查工作的精细化与科学化,为后续的考古发掘与研究、遗址保护以及文化遗产活化利用提供了更加翔实、有效的材料。
激光雷达早在三十年前就已经引入考古学领域,成为继航空可见光遥感后又一场革命。南阳古代城址调查的实践证明了激光雷达除了在雨林地区考古遗址大显身手外,在历史时期城址调查方面潜力巨大。激光雷达数据清晰显示了目标城址遗迹的细致结构,将那些沉寂在山烟蔓草中的古代城址重新展示在我们面前,唤醒我们对文化遗产的共同记忆。在无人机飞行平台的加持下,激光雷达可以覆盖更广的面积,其精度亦可满足城址调查和遗迹识别的需求,并且能够发现既往研究和实地勘察中无法发现的考古遗迹现象。除了制作反映裸土地表信息的高精度DEM外,激光雷达点云还可与机器学习、图像识别等人工智能结合,构建考古遗迹识别模型,进而实现对同一类遗迹的自动化识别,并由此探讨遗迹空间结构特征的量化表达方法,从定量遥感的角度分析考古特征,进而探讨其中的文化因素,思考文明产生和发展,让激光雷达数据不仅仅作为考古成果展示的载体,更成为空间考古研究和深度分析的重要材料。事实证明,激光雷达技术在城市考古调查和研究中有着广阔的应用前景,对其的研究和实践应该持续不断深入推进,并探索激光雷达技术与考古学本身的融合,推动城市考古向着科学化、精准化方向发展。本文是南阳文物保护研究院与西北大学文化遗产学院合作《河南南阳古代城址区域考古调查》项目的成果之一。作者单位:西北大学文化遗产学院 南阳文物保护研究院